Media Summary: Localization in Orchard using Stereo Odometey and RTAB-Map SLAM An Example of our results from utilizing the In this video, we demonstrate the use of stereo odometry with
Rtab Map Slam Localization - Detailed Analysis & Overview
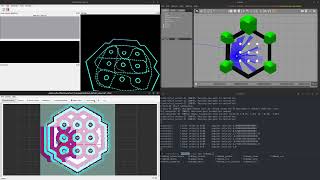
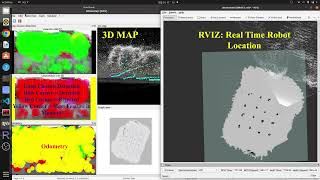
Localization in Orchard using Stereo Odometey and RTAB-Map SLAM An Example of our results from utilizing the In this video, we demonstrate the use of stereo odometry with The odometry is obtained by fake Lidar (depth sensor of RGDB camera). 3-D Mapping using Ouster 16 Beam LIDAR and rtabmap This video contains a ROS2 simulation of a Unitree GO2 robot integrated with a Realsense D435 depth camera plugin used to ...
[Tutorial] iPad SLAM (RTAB-Map app) results extraction More info: 0:00 First Loop 4:00 Second Loop.






![[ROS tutorial] RTAB-Map in ROS 101](https://i.ytimg.com/vi/gJz-MWn7jhE/mqdefault.jpg)








![[Tutorial] iPad SLAM (RTAB-Map app) results extraction](https://i.ytimg.com/vi/WcRcJCH67ds/mqdefault.jpg)