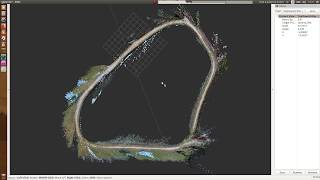
Media Summary: The odometry is obtained by fake Lidar (depth sensor of RGDB camera). An Example of our results from utilizing the [Tutorial] iPad SLAM (RTAB-Map app) results extraction
Slam On Docker Rtab Map - Detailed Analysis & Overview
The odometry is obtained by fake Lidar (depth sensor of RGDB camera). An Example of our results from utilizing the [Tutorial] iPad SLAM (RTAB-Map app) results extraction MASc students Nicholas Charron and Stephen Phillips take a Clearpath Husky through a lab at UW demonstrating the use of ... Onboard processing unit: NVIDIA Jetson TX-1 Camera: Intel D435i Chassis: Traxxas Slash 2WD.

![[ROS tutorial] RTAB-Map in ROS 101](https://i.ytimg.com/vi/gJz-MWn7jhE/mqdefault.jpg)






![[Tutorial] iPad SLAM (RTAB-Map app) results extraction](https://i.ytimg.com/vi/WcRcJCH67ds/mqdefault.jpg)