Media Summary: UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Comparison between real and virtual 3rd person views of a This video describes an implementation of A Four-wheels
Robot Mapping Using Rtabmap Slam - Detailed Analysis & Overview
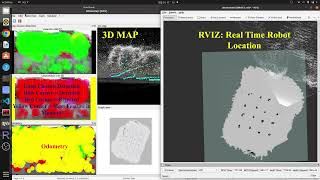
UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Comparison between real and virtual 3rd person views of a This video describes an implementation of A Four-wheels Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... In this video, I demonstrate how I created a 3D Okay so these are terms which occur in the context of
3-D Mapping using Ouster 16 Beam LIDAR and rtabmap