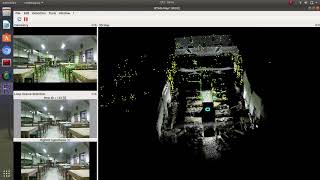
Media Summary: The odometry is obtained by fake Lidar (depth sensor of RGDB camera). [Hubo Lab] Mapping with Rtabmap on DRC_Hubo In this video, I demonstrate how I created a 3D
Mapping The Lab With Rtabmap - Detailed Analysis & Overview
The odometry is obtained by fake Lidar (depth sensor of RGDB camera). [Hubo Lab] Mapping with Rtabmap on DRC_Hubo In this video, I demonstrate how I created a 3D Test RTAB-Map in PIC4SeR Lab - Politecnico di Torino Microsoft considers non-gaming applications, such as in robotics, medicine, and health care, the primary market for Kinect. This video demonstrates 3D scanning of Model and Project
MASc students Nicholas Charron and Stephen Phillips take a Clearpath Husky through a 3-D Mapping using Ouster 16 Beam LIDAR and rtabmap This is a Mobile Manipulator powered by ROS and the Jetson Nano embedded computer, created for my Graduation Project ... Pointcloud generation with RTAB map and ROS


![[Hubo Lab] Mapping with Rtabmap on DRC_Hubo](https://i.ytimg.com/vi/rNvtmGvk9oE/mqdefault.jpg)