Media Summary: MY095 - Implementing Optimal Reciprocal Collision Avoidance (ORCA) for robotic navigation Human guidance in situations where the users cannotrelyontheirmainsensorymodalities,suchasassistiveor search-and-rescue ... J. Alonso-Mora, A. Breitenmoser, M. Rufli, P. Beardsley, R. Siegwart, Proceedings of the 10th International Symposium on ...
Optimal Reciprocal Collision Avoidance Basic Implementation - Detailed Analysis & Overview
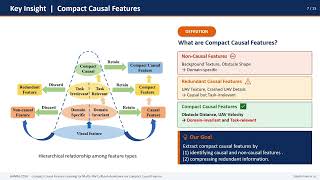
MY095 - Implementing Optimal Reciprocal Collision Avoidance (ORCA) for robotic navigation Human guidance in situations where the users cannotrelyontheirmainsensorymodalities,suchasassistiveor search-and-rescue ... J. Alonso-Mora, A. Breitenmoser, M. Rufli, P. Beardsley, R. Siegwart, Proceedings of the 10th International Symposium on ... Shown are simulations and experiments for work on "Generalized ORCA(optimal reciprocal collision avoidance) based on ROS and DDMR for 11 agents ... how can we do this well there are several solutions but one of the ones I found was
Little visualization tool I built for python this morning, using pygame, that shows the "Velobstacles" and the ORCA line inferred by ... I recently added Separating Axis Theorem to my game engine, which is an approach for working out 2D ROC (Receiver Operator Characteristic) graphs and AUC (the area under the curve), are useful for consolidating the information ... In 1988, three engineers came together and developed one of the most clever solutions to the problem of detecting when two ...