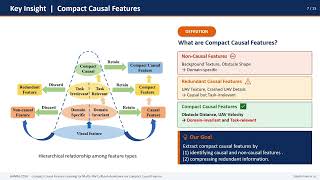
Media Summary: Learning Robust Policy for Multi UAV Collision Avoidance via Compact Causal Feature(AAMAS 2026) Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Paper: GitHub: This video overviews our ...
Learning Robust Policy For Multi Uav Collision Avoidance Via Compact Causal Feature - Detailed Analysis & Overview
Learning Robust Policy for Multi UAV Collision Avoidance via Compact Causal Feature(AAMAS 2026) Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Paper: GitHub: This video overviews our ... This work presents a scalable and distributed Niu, H., Savvaris, A. and Tsourdos, A., 2017, September. USV geometric In this video a Nonlinear Model Predictive Control is employed on Micro Aerial Vehicle to perform reference trajectory tracking and ...
We present a distributed control strategy for a team of agents to autonomously achieve a desired 3D formation. Our approach is ... Autonomous Driving Vehicle and Reinforcement Authors: Fabricio E Rodriguez Cesen, University of Campinas - UNICAMP, Brazil Géza Szabó, Ericsson Research, Hungary ... This is a final simulation video of implementation of This is a short demo of the published paper Decentralized prioritized motion planning for multiple autonomous This video gives a practical overview of how to build
This demo was recorded at the University of Texas at Austin, in the Aerospace Engineering Department, GNC Lab. My website: ...