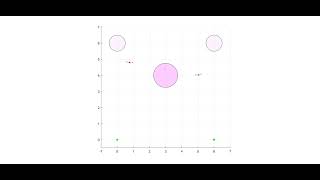
Media Summary: This video illustrates five planar quadrotors (quadrotor confined to the 2D plane) avoiding a single Python Implementation of Reciprocal Velocity Paper submitted to the MED 2026. Abstract: Distributed control schemes are essential for scalable
Multi Agent Collision Avoidance Of A Static Obstacle - Detailed Analysis & Overview
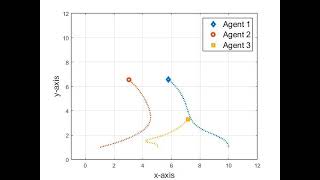
This video illustrates five planar quadrotors (quadrotor confined to the 2D plane) avoiding a single Python Implementation of Reciprocal Velocity Paper submitted to the MED 2026. Abstract: Distributed control schemes are essential for scalable Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) This simulation was created in MATLAB. The animation demonstrates the influence of velocity matching. The red 'X' represents ...
The method used is distributed LQ discrete-time game. Reciprocal Velocity Objects - Multi Agent Collision Avoidance Reciprocal Velocity Obstacles for real-time multi-agent navigation : 12 agents Barrier functions for multi-agent ellipsoid collision avoidance This video illustrates two planar quadrotors (quadrotor confined to the 2D plane) avoiding a mid-air This simulation was created in MATLAB. This animation demonstrates Algorithm 3. There are 20 alpha-
This work presents a scalable and distributed