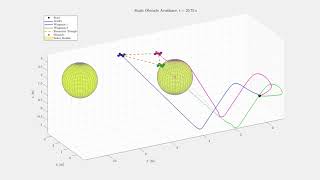
Media Summary: The method used is distributed LQ discrete-time game. Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) This video illustrates five planar quadrotors (quadrotor confined to the 2D plane) avoiding a single static
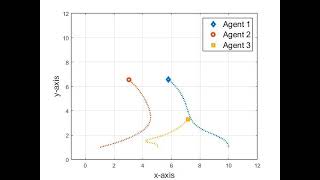
Line Formation With Collision Avoidance Of Multi Agent Systems - Detailed Analysis & Overview
The method used is distributed LQ discrete-time game. Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) This video illustrates five planar quadrotors (quadrotor confined to the 2D plane) avoiding a single static Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Video presentation of the paper: A. Serra-Gomez, B. Brito, H. Zhu, J. J. Chung and J. Alonso-Mora, ”Whom to Communicate: ... A leader UAV (blue) and two wingman UAVs (pink and green) are in a
This simulation was created in MATLAB. The animation demonstrates the influence of velocity matching. The red 'X' represents ... We present a distributed control strategy for quadrotors to autonomously achieve a desired Reciprocal Velocity Objects - Multi Agent Collision Avoidance This work is submitted under the title "Communication-Efficient This simulation was created in MATLAB. This animation demonstrates Algorithm 1. There are 100 alpha- This work presents a scalable and distributed