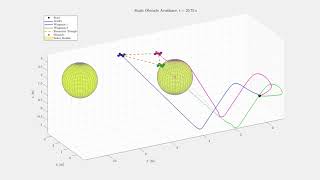
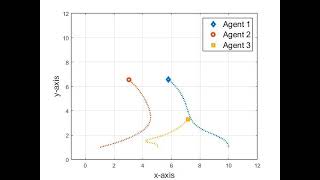
Media Summary: Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Learning Robust Policy for Multi UAV Collision Avoidance via Compact Causal Feature(AAMAS 2026) The video shows demonstration of position swapping for four
A Scalable Distributed Collision Avoidance Scheme For Multi Agent Uav Systems - Detailed Analysis & Overview
Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Learning Robust Policy for Multi UAV Collision Avoidance via Compact Causal Feature(AAMAS 2026) The video shows demonstration of position swapping for four Detecting and estimating distances to power lines is a challenge for both human This video illustrates five planar quadrotors (quadrotor confined to the 2D plane) This video show a recent work in the Robotics Intelligent
Academy Winner / Dário Pedro Conceptual framework focused on This simulation was created in MATLAB. This animation demonstrates Algorithm 1. There are 100 alpha- We present a novel control strategy for a team of This is a final simulation video of implementation of













![[AIIA 2021] Collision Avoidance on Unmanned Aerial Vehicles using Deep Neural Networks](https://i.ytimg.com/vi/Bv8oP0GT4o8/mqdefault.jpg)




