Media Summary: Barrier functions for multi-agent ellipsoid collision avoidance This video shows the simulations and experimental results that validate the efficacy of a coalition cone controlled In this work, we propose a new class of Control
Barrier Functions For Multi Agent Ellipsoid Collision Avoidance - Detailed Analysis & Overview
Barrier functions for multi-agent ellipsoid collision avoidance This video shows the simulations and experimental results that validate the efficacy of a coalition cone controlled In this work, we propose a new class of Control Abstract: In this paper, we propose a new class of Control Control Barrier Function In Action (Obstacle Avoidance) Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full)
Link to the paper: Robots operating in real world settings must navigate and maintain safety while ... MAE 207 Safety for Autonomous Systems Guest Lecturer: Jason Choi, UC Berkeley, Two teams of 5 robots playing in RoboCup MSL league are simulated, each player has to move to a different place every 4 ... Probabilistic Safe Reinforcement Learning using Control Lyapunov Stability (to desired orbit) + Control Barrier Function (avoiding obstacle) This video demonstrates the real-time robot path planning in action for dynamic
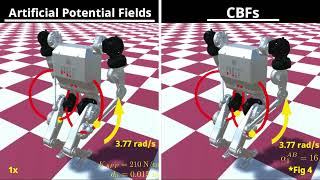
TU Delft Delft Center for Systems and Control (DCSC) Colloquia Series – Recording Safety-critical control, control ... Humanoid Self-Collision Avoidance Using Whole-Body Control with Control Barrier Functions This work presents an adaptive formation and