Media Summary: Collision avoidance with static obstacles using MIQP Collision avoidance with moving obstacles using MIQP Collision avoidance with static obstacles using time- varying constraints
Collision Avoidance With Static Obstacles Using Miqp - Detailed Analysis & Overview
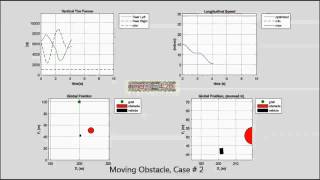
Collision avoidance with static obstacles using MIQP Collision avoidance with moving obstacles using MIQP Collision avoidance with static obstacles using time- varying constraints Collision avoidance with moving obstacles using radar and MIQP Paper submitted to the MED 2026. Abstract: Distributed control schemes are essential for scalable multi-agent coordination, ... In autonomous vehicle navigation, the complex challenge lies in ensuring high-speed
AB trajektória, MIQP, statické prekážky Feng Xiao, Peter Zheng, Julien di Tria, Basaran Bahadir Kocer and Mirko Kovac Optic Flow Based Reactive Richard Cockburn Maclaurin Professor of Aeronautics and Astronautics Read full story here: Collision avoidance with moving obstacles using radar and time-varying constraints IROS 2019 Common formulations to consider Collision Avoidance based on Velocity Obstacle
This is a simulation of an autonomous vehicle J. Alonso-Mora, A. Breitenmoser, P. Beardsley, R. Siegwart, IEEE International Conference on Robotics and Automation (ICRA), ... This is an closed loop simulation of autonomous vehicle(green) reaching a goal point while Collision avoidance using time-varying constraints - nonlinear dynamics of agent Reciprocal Velocity Objects - Multi Agent Collision Avoidance