Media Summary: Control Barrier Function In Action (Obstacle Avoidance) Presentation for the IEEE International Conference on Robotics and Automation (ICRA) 2021. Paper available at: ... MAE 207 Safety for Autonomous Systems Guest Lecturer: Jason Choi, UC Berkeley,
106b Discussion Control Barrier Functions - Detailed Analysis & Overview
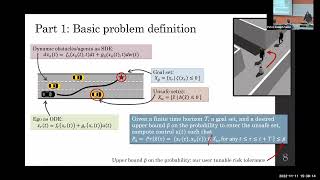
Control Barrier Function In Action (Obstacle Avoidance) Presentation for the IEEE International Conference on Robotics and Automation (ICRA) 2021. Paper available at: ... MAE 207 Safety for Autonomous Systems Guest Lecturer: Jason Choi, UC Berkeley, Learning for Safety-Critical Control with Video by Taekyung Kim: Project Page: Abstract: In this talk, we build upon the theory of
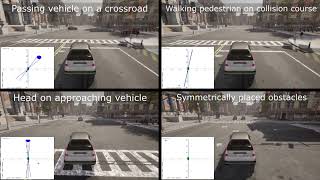
Supplementary video for "Output Feedback Backup This paper introduces a safety filter to ensure collision avoidance for multirotor aerial robots. The proposed formalism leverages a ...










![[ICRA 2025] Learning to Refine Input Constrained Control Barrier Functions](https://i.ytimg.com/vi/255IUS1f6Lo/mqdefault.jpg)