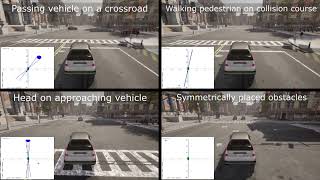
Media Summary: MAE 207 Safety for Autonomous Systems Guest Lecturer: Jason Choi, UC Berkeley, A main challenge restricting the application of The simulation was made in Simulink using the automated driving toolbox and visualized in Unreal Engine. The code is based on ...
Lec 40 Control Barrier Function Cbf - Detailed Analysis & Overview
MAE 207 Safety for Autonomous Systems Guest Lecturer: Jason Choi, UC Berkeley, A main challenge restricting the application of The simulation was made in Simulink using the automated driving toolbox and visualized in Unreal Engine. The code is based on ... Control Barrier Function In Action (Obstacle Avoidance) A simple prototype simulation for my work on Adversarially Resilient This video presents our research, "Safe Trajectory Planning with Bernstein Polynomials Under
This paper introduces a safety filter to ensure collision avoidance for multirotor aerial robots. The proposed formalism leverages a ... Supplementary video for "Output Feedback Backup This colloquium, held by Assistant Prof. Federico Califano at Robotics and Mechatronics (RaM) group (), ... Autonomy advances have enabled robots in diverse environments and close human interaction, necessitating controllers with ... Autonomy Talks - 11/01/2022 Speaker: Prof. Sylvia Herbert, UC San Diego Title: Connections between Hamilton-Jacobi ...