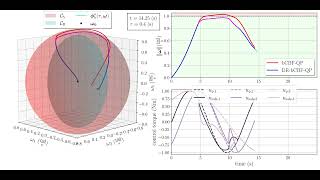
Media Summary: A simple prototype simulation for my work on Adversarially Resilient Supplemental video for "Disturbance-Robust Title: Practical Considerations for Discrete-Time Implementations of Continuous-Time
Output Feedback Backup Control Barrier Functions - Detailed Analysis & Overview
A simple prototype simulation for my work on Adversarially Resilient Supplemental video for "Disturbance-Robust Title: Practical Considerations for Discrete-Time Implementations of Continuous-Time Autonomous robot navigation can be particularly demanding, especially when the surrounding environment is not known and ... MAE 207 Safety for Autonomous Systems Guest Lecturer: Jason Choi, UC Berkeley, This colloquium, held by Assistant Prof. Federico Califano at Robotics and Mechatronics (RaM) group (), ...
Autonomy Talks - 11/01/2022 Speaker: Prof. Sylvia Herbert, UC San Diego Title: Connections between Hamilton-Jacobi ... Georgios Fainekos Senior Principal Scientist Toyota Motor North America R&D Abstract: Autonomous Cyber-Physical Systems ... Ensuring robot safety in complex environments is a difficult task due to actuation limits, such as torque bounds. This paper ...