Media Summary: Trajectory optimization of robots through contact Presentation for IROS 2023 paper: Michael R. Turski, Joseph Norby, and Aaron M. Johnson. "Staged Full paper and additional information available at Publication: "
Trajectory Optimization Of Robots Through Contact - Detailed Analysis & Overview
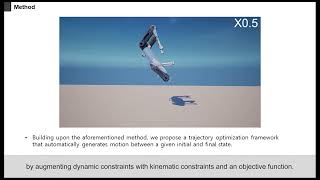
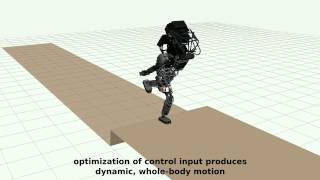
Trajectory optimization of robots through contact Presentation for IROS 2023 paper: Michael R. Turski, Joseph Norby, and Aaron M. Johnson. "Staged Full paper and additional information available at Publication: " Video for publication J. Carius, R. Ranftl, V. Koltun and M. Hutter, " This video summarizes our work on discovering complex Performing highly agile acrobatic motions with a long flight phase requires perfect timing, high accuracy, and coordination of the ...
My course project for MIT 6.832 ( Code and report will be available on my website ... Authors: Michael Posa, Russ Tedrake Title: Conference paper accepted to the 2025 IEEE International Conference on In this paper we propose a method to improve the accuracy of Paper, video, open-source code, slides and more: Intro: 00:29 - Why Legged MIT 6.832 Final Project (Spring 2022) See paper here: Code available here: ...