Media Summary: Video for publication J. Carius, R. Ranftl, V. Koltun and M. Hutter, " Paper, video, open-source code, slides and more: Intro: 00:29 - Why A pre-recorded version of our presentation at the 2021 International Conference on
Trajectory Optimization For Legged Robots With Slipping Motions - Detailed Analysis & Overview
Video for publication J. Carius, R. Ranftl, V. Koltun and M. Hutter, " Paper, video, open-source code, slides and more: Intro: 00:29 - Why A pre-recorded version of our presentation at the 2021 International Conference on Check out our new publication of our roller-walking Talk given at the Pravartana workshop, held at the Indian Institute of Technology, Kanpur, July 23-25, 2014. Slides and code are ... Paper, entire open-source code to generate these
This video shows visualizations in MATLAB and simulations in MuJoCo of Full paper and additional information available at Publication: " Our approach combines the strengths of reinforcement learning (RL) - planning in high-dimensional observation spaces with ... We present a pipeline for planning and control of complex Xuan Lin, Jingwen Zhang, Junjie Shen, Gabriel Fernandez, and Dennis Hong 2019 IEEE/RSJ International Conference on ... Publication by Tim Seyde, Jan Carius, Ruben Grandia, Farbod Farshidian, Marco Hutter
Henrique Ferrolho ( Guest Lecture for the Optimal Control & Learning Course ... Description: Video submission of the paper " Nonlinear Stochastic


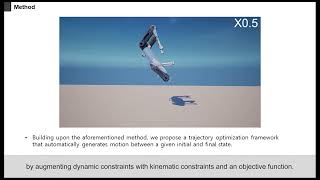
![[ICRA 2021 - Presentation] Online Trajectory Optimization for Aerial Motions of a Quadruped Robot](https://i.ytimg.com/vi/yEt1p-WZToo/mqdefault.jpg)



![Robot Trajectory Optimization | Intro to Robotics [Lecture 32]](https://i.ytimg.com/vi/JzZarlGRoR0/mqdefault.jpg)