Media Summary: Paper, video, open-source code, slides and more: Intro: 00:29 - Why ICRA 2018 Spotlight Video Interactive Session Tue PM Pod H.2 Authors: Winkler, Alexander W.; Bellicoso, C. Dario; Hutter, Marco ... ... IFOPT) and visualize (XPP), slides and more: Publication: "
Tutorial Gait And Trajectory Optimization For Legged Robots - Detailed Analysis & Overview
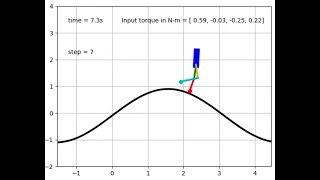
Paper, video, open-source code, slides and more: Intro: 00:29 - Why ICRA 2018 Spotlight Video Interactive Session Tue PM Pod H.2 Authors: Winkler, Alexander W.; Bellicoso, C. Dario; Hutter, Marco ... ... IFOPT) and visualize (XPP), slides and more: Publication: " Video for publication J. Carius, R. Ranftl, V. Koltun and M. Hutter, " Implemented the direct collocation method of Trajectory Optimization using Learned Robot-Terrain Interaction Model
Quadruped Robot Gait and Trajectory Optimization Publication by Tim Seyde, Jan Carius, Ruben Grandia, Farbod Farshidian, Marco Hutter Talk given at the Pravartana workshop, held at the Indian Institute of Technology, Kanpur, July 23-25, 2014. Slides and code are ... This work is presented by LIDAR student Ziyi Zhou. Experimental results performed by Callen Fisher as part of his PhD at UCT. Full paper and additional information available at Publication: "