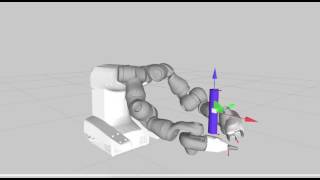
Media Summary: In this work, we propose a data-driven approach for real-time Video of our agricultural multipurpose manipulator (developed within the EU-project CROPS) showing its model for TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231)
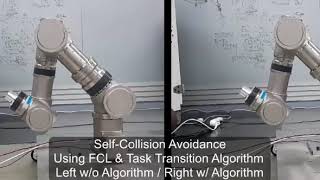
Self Collision Avoidance Using Task Transition Algorithm - Detailed Analysis & Overview
In this work, we propose a data-driven approach for real-time Video of our agricultural multipurpose manipulator (developed within the EU-project CROPS) showing its model for TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231) PRISMA Lab research video experiments - Reactive Video of the Test n.2 presented in the paper "Multiple Richard Cockburn Maclaurin Professor of Aeronautics and Astronautics Read full story here:
Fixed targets for both arms (yellow points); active Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Part of setting up a cobot is telling it about the world in which it works. And part of that world includes things to avoid, like parts of ... Self-Collison Avoidance Using FCL & Task Transition 12-DoF robot arm, in simulation under Actin control, showing The world is full of clutter. In order to operate effectively in uncontrolled, real world spaces, robots must navigate safely by ...
Title : A Unified Framework for Coordinated Multi-Arm Motion Planning Authors: Seyed Sina Mirrazavi Salehian * , Nadia Figueroa ... IROS 2019 Common formulations to consider