Media Summary: In this video, we deal with the issue of detecting In this video, we cover another way of writing out the coordinate This is a video supplement to the book "Modern
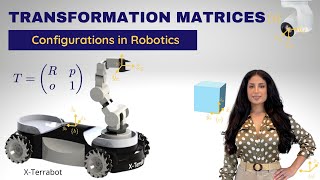
How Do Robots Avoid Collisions Branched Homogeneous Transforms Robotics 101 - Detailed Analysis & Overview
In this video, we deal with the issue of detecting In this video, we cover another way of writing out the coordinate This is a video supplement to the book "Modern Vectors Coordinate Geometry Calculus Linear Algebra Matrices Intro To Contents (00:00) Introduction (01:27) This video covers one of the fundamental concepts in
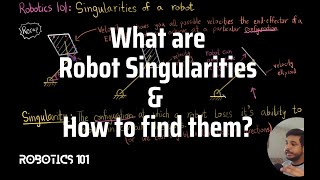
In this video, we discuss perhaps the most important thing when dealing with In this video, we discuss successive coordinate