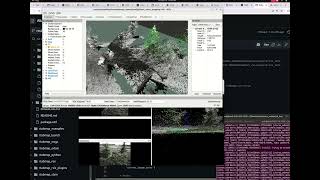
Media Summary: RTAB-Map ROS stereo outdoor mapping problem The odometry is obtained by fake Lidar (depth sensor of RGDB camera). This is a project from the Udacity Robotics Nanodegree. It uses a ROS package called
Rtab Map Ros2 Humble Outdoor Stereo Vslam Mapping Simulation - Detailed Analysis & Overview
RTAB-Map ROS stereo outdoor mapping problem The odometry is obtained by fake Lidar (depth sensor of RGDB camera). This is a project from the Udacity Robotics Nanodegree. It uses a ROS package called Using RealSense T265 tracking camera for VIO and D415 for video-to-laser Hello Everyone, It's my second ROS (Robot Operating System) project: 3D Watch the Hiwonder MentorPi M1 Raspberry Pi 5 robot car demonstrate
In this video, the 3D map of indoor environment is created and saved in the memory using Here we show our latest rover version, Scatcat III_1. We are testing the D435i camera with This is my test run following the instructions given on You can ...