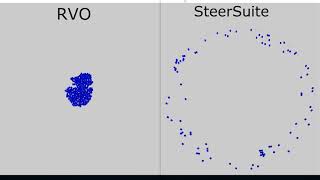
Media Summary: Elliptical Agents - Conservative Collision Avoidance Reciprocal Velocity Objects - Multi Agent Collision Avoidance A comparison video of the original RVO crowd model [1] vs the implemented RVO model in SteerSuite [2] Variations in speed are ...
Reciprocal Collision Avoidance Rvo2 In Mace - Detailed Analysis & Overview
Elliptical Agents - Conservative Collision Avoidance Reciprocal Velocity Objects - Multi Agent Collision Avoidance A comparison video of the original RVO crowd model [1] vs the implemented RVO model in SteerSuite [2] Variations in speed are ... There are 20 agents and one is dislocated by 3 points. ... algorithm letting multiple mobile robots with non-linear and non-homogeneous dynamics perform Shown are simulations and experiments for work on "Generalized
MY095 - Implementing Optimal Reciprocal Collision Avoidance (ORCA) for robotic navigation