Media Summary: Authors: M. A. Santos, A. Ferramosca, G. V. Raffo. This work presents an Economic ... project "Mobile robot motion planning and and control with In the first part of the lecture we finish the session on how to optimize trajectories for a differential-drive robot to reach a target ...
Obstacle Avoidance With Mpc Controller - Detailed Analysis & Overview
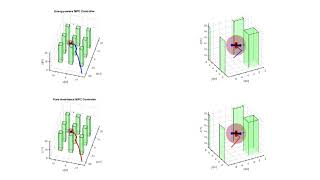
Authors: M. A. Santos, A. Ferramosca, G. V. Raffo. This work presents an Economic ... project "Mobile robot motion planning and and control with In the first part of the lecture we finish the session on how to optimize trajectories for a differential-drive robot to reach a target ... MPC with Velocity Obstacle for Dynamic Obstacles IEEE LARS 2021 Abstract: This work proposes a single-layer nonlinear finite-horizon optimal Abstract: This work considers an Economic
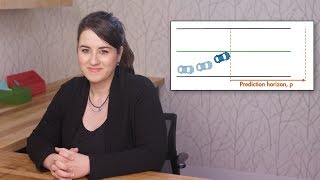
Using a simple car example, this video provides insight into an Experiments on the X1 research vehicle to avoid a simulated car door that may open into its lane. Contingency ICUAS 2021 Abstract: This work proposes a single-layer finite-horizon optimal This work proposes single-layer nonlinear My final experiment for bachelor's thesis at Czech Technical University, Faculty of Electrical Engineering. My task was to create a ... Two-level Model Predictive Control Obstacle Avoidance
In this video, I take my PhD research to the next level by demonstrating advanced