Media Summary: Live slides available at Class textbook available at Speaker: Jeffrey Ichnowski, UC Berkeley Abstract: Instructor: Pieter Abbeel Course Website:
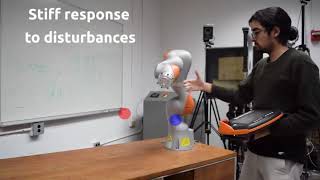
Lecture 15 Optimization And Learning For Robot Control Implementing Mpc On A Manipulator - Detailed Analysis & Overview
Live slides available at Class textbook available at Speaker: Jeffrey Ichnowski, UC Berkeley Abstract: Instructor: Pieter Abbeel Course Website: This video is part of the RoboJackets Software Training Program for Fall 2021. An Optimization Based Cartesian Controller for Mobile Manipulation This is the video for the final project of ME 231A: Experimential Advanced
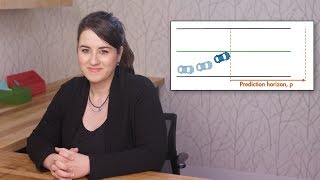
A Novel MPC Approach to Optimize Force Feedback for Human-Robot Shared Control Ricardo Sanfelice UC Santa Cruz November 8, 2019 Hybrid systems model the behavior of dynamical systems in which the states ...