Media Summary: Full title: Constrained and optimal planning Presentation by Jay Patrikar and Brady Moon, part of the AirLab Summer School 2020. Sessions list, overviews, and links to the ... An initial implementation/proof of concept of whole body
Motion Planning Using Ompl Ode - Detailed Analysis & Overview
Full title: Constrained and optimal planning Presentation by Jay Patrikar and Brady Moon, part of the AirLab Summer School 2020. Sessions list, overviews, and links to the ... An initial implementation/proof of concept of whole body My name is Andrew Choi and I am a 1st year PhD student at UCLA, here to present my work on preemptive Provably-correct robot control with LTLMoP, OMPL and ROS For CS498IR: AI for Robotic Manipulation Spring 2021, University of Illinois at Urbana-Champaign Instructor: Kris Hauser ...
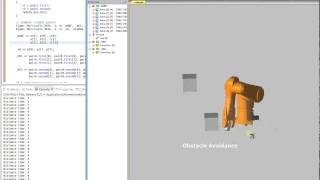
This is a demo showing the behavior of RRTConnect, a sampling-based This is a small example of the Robotics Library, which is available for download at It ... [GSOC2018] OMPL Navigation in 3 dimension NRMKFoundation: Neuromeka library for Robot Control For more information visit: moveit.ros.org,











![[GSOC2018] OMPL Navigation in 3 dimension](https://i.ytimg.com/vi/Bg3vfdVvPlY/mqdefault.jpg)