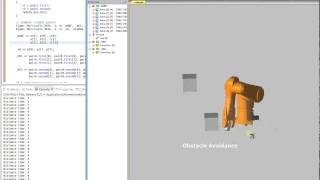
Media Summary: Provably-correct robot control with LTLMoP, OMPL and ROS In this video we get an overview of how ros2_control works, and how to use it in a simulated Gazebo A Human-In-the-Loop, Linear Temporal Logic Planning and
Provably Correct Robot Control With Ltlmop Ompl And Ros - Detailed Analysis & Overview
Provably-correct robot control with LTLMoP, OMPL and ROS In this video we get an overview of how ros2_control works, and how to use it in a simulated Gazebo A Human-In-the-Loop, Linear Temporal Logic Planning and This is a demo showing the behavior of RRTConnect, a sampling-based motion planner often used in An initial implementation/proof of concept of whole body motion planning with footstep generation and non-chain inverse ... [GSOC2018] Navigation of Ardrone with OMPL(1)
This video demonstrates a Aldebaran Nao playing hide and seek with a person using Global Navigation with OMPL (JdeRobot Academy) or_ompl provides OpenRAVE bindings for the










![[GSOC2018] Navigation of Ardrone with OMPL(1)](https://i.ytimg.com/vi/ZQ0N7v7wdHg/mqdefault.jpg)



