Media Summary: Organization, Introduction, Problem Formulation See Sarah Keren is a professor in the Technion Faculty of Computer Science and the director of the Collaborative Artificial Intelligence ... To access the translated content: 1. The translated content of this course is available in regional languages. For details please ...
Cs498ir Offline Lecture 11 Motion Planning - Detailed Analysis & Overview
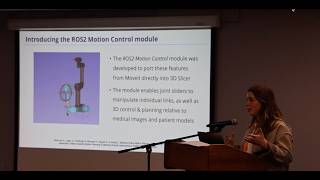
Organization, Introduction, Problem Formulation See Sarah Keren is a professor in the Technion Faculty of Computer Science and the director of the Collaborative Artificial Intelligence ... To access the translated content: 1. The translated content of this course is available in regional languages. For details please ... Video recording from ISMR 2026 Workshop "SlicerROS2 as an In Silico Testing Environment for Medical Robotics Research". In these videos we're going to look at a set of problems that are related to robot