Media Summary: Learning Based Navigation and Collision Avoidance Through Reinforcement for UAVs Amid the recent advances in robotics and machine Collision avoidance of unmanned ground vehicle using deep reinforcement learning
Learning Based Navigation And Collision Avoidance Through Reinforcement For Uavs - Detailed Analysis & Overview
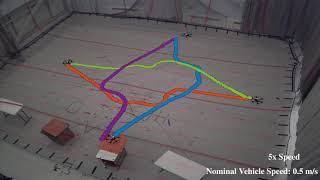
Learning Based Navigation and Collision Avoidance Through Reinforcement for UAVs Amid the recent advances in robotics and machine Collision avoidance of unmanned ground vehicle using deep reinforcement learning Code: Title: Accelerated Sim-to-Real Deep Quadrotors are agile. Unlike most other machines, they can traverse extremely complex environments at high speeds. To date ... For more details, please refer to the below paper:
More details, please refer to below paper: