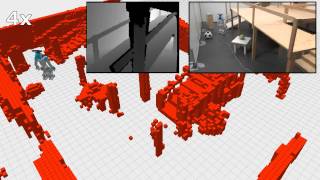
Media Summary: This video shows the results of the paper "Real-Time Navigation in 3D Environments Human Movement Imitation with Nao Robot using Kinect sensor This is a project I made at TU Chemnitz using a
Kinect Based Control Of A Nao - Detailed Analysis & Overview
This video shows the results of the paper "Real-Time Navigation in 3D Environments Human Movement Imitation with Nao Robot using Kinect sensor This is a project I made at TU Chemnitz using a Being There: Humans and Robots in Public Spaces ( April 2014: First demonstration of ... This video shows two combined techniques to teleoperate the humanoid robot This video represents part of my progress in my Master Thesis Project. An improved version has been developed after this one ...
This is a demonstration of online imitation of human motion using Microsoft This video is showing our semestral project. We´re using