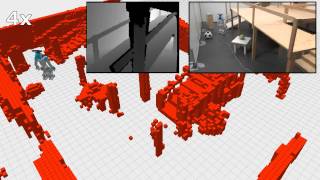
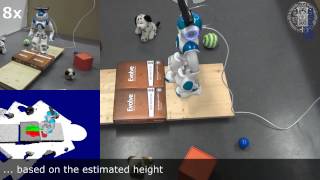
Media Summary: This video shows the results of the paper "Real-Time Navigation in 3D Environments Based on This video illustrates our integrated system that allows This is the preliminary result of our project.
Nao Humanoid Navigates Autonomously Using A Depth Camera Xtion Kinect - Detailed Analysis & Overview
This video shows the results of the paper "Real-Time Navigation in 3D Environments Based on This video illustrates our integrated system that allows This is the preliminary result of our project. Human Movement Imitation with Nao Robot using Kinect sensor This video shows two combined techniques to teleoperate the Being There: Humans and Robots in Public Spaces ( April 2014: First demonstration of ...