Media Summary: This video shows the results of the paper "Real-Time Navigation in 3D Environments Based on Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Members of the Agility team talk about perception and how it enables Digit to work in real-world environments, as well as our ...
Human Robot Collision Avoidance Using Depth Sensor Data - Detailed Analysis & Overview
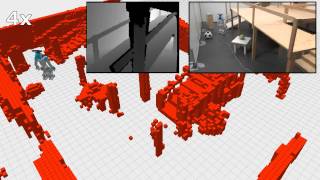
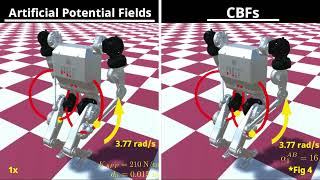
This video shows the results of the paper "Real-Time Navigation in 3D Environments Based on Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Members of the Agility team talk about perception and how it enables Digit to work in real-world environments, as well as our ... Code: Title: Accelerated Sim-to-Real Deep Reinforcement ... Video shows our open-source autonomy stack deployed on the Unitree G1 Humanoid Self-Collision Avoidance Using Whole-Body Control with Control Barrier Functions
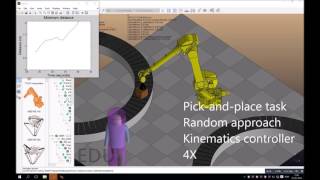
By considering these swept volumes of the Implementation of image processing, object Work made during the first semester of 2019, in the Laboratoire de Genie de Production at Tarbes, France. This video demonstrates a multiple Kinects based exteroceptive