Media Summary: This video demonstrates the real-time and efficient More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. Work made during the first semester of 2019, in the Laboratoire de Genie de Production at Tarbes, France.
Collision Avoidace In Human Robot Interaction - Detailed Analysis & Overview
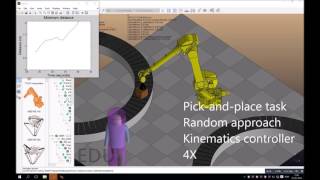
This video demonstrates the real-time and efficient More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. Work made during the first semester of 2019, in the Laboratoire de Genie de Production at Tarbes, France. Sawyer adapts to the scene to plan the best trajectory. Stops and re-plans with a different speed according to user position. Alan HUI BON HOA, Vice President of United Robotics Group, shows us the evolution of Video illustrating the paper published in Ubiquitous ...
Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Robot Manipulator's Dynamic Obstacle Avoidance