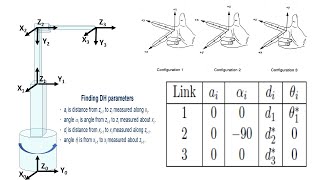
Media Summary: ... another video on robotics today I'll tell you what d.h parameter is commonly known as d edge me 5243 - 24.2 -representing spatial mechanisms: DH parameters Lecture 5b are worked out problems assigning link frames using the
Introduction To Dh Convention - Detailed Analysis & Overview
... another video on robotics today I'll tell you what d.h parameter is commonly known as d edge me 5243 - 24.2 -representing spatial mechanisms: DH parameters Lecture 5b are worked out problems assigning link frames using the In this video, you are given the definitions of the four This video explains the transformation between the two frames of reference using