Media Summary: This is a video supplement to the book "Modern In this video, we discuss how to construct the In this video, we cover another way of writing out the coordinate
Introduction To Homogeneous Transforms In Robotics - Detailed Analysis & Overview
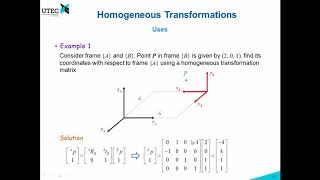
This is a video supplement to the book "Modern In this video, we discuss how to construct the In this video, we cover another way of writing out the coordinate Location just operate this and live that matrix we can decompose now using this the Virtual Reality by Prof Steven LaValle, Visiting Professor, IITM, UIUC. For more details on NPTEL visit Vectors Coordinate Geometry Calculus Linear Algebra Matrices
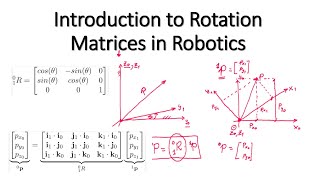
In this video, we deal with the issue of detecting collisions between mobile This video introduces the concept of position vectors and orientation/rotation matrices to formulate a frame and a