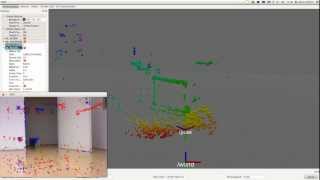
Media Summary: Demonstration of the C-KLAM algorithm on a quadrotor dataset in the Walter Library, University of Minnesota. The blue trajectory ... This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ... Sean McQuillan () covers building complex animations using ConstraintLayout and ConstraintSet. By specifying your ...
Constrained Keyframe Based Localization And Mapping - Detailed Analysis & Overview
Demonstration of the C-KLAM algorithm on a quadrotor dataset in the Walter Library, University of Minnesota. The blue trajectory ... This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ... Sean McQuillan () covers building complex animations using ConstraintLayout and ConstraintSet. By specifying your ... Monocular SLAM running on the Kitti dataset. A 2.5D up to scale reconstruction is performed locally in each KudanSLAM: Keyframe Constrained Visual SLAM for Visual Odometry Introducing object-level semantic information into simultaneous
Accepted to ICRA2022. We revisit the problem of efficiently leveraging prior Lecture: Self-Driving Cars (Prof. Andreas Geiger, University of Tübingen) Course Website with Slides, Lecture Notes, Problems ... Enhancing SLAM Keyframe Selection with an Efficient ConvNet for Semantic Analysis A user moving over three different floors (see the 3D view in the top right pane) and being tracked by the CamSLAM smartphone ... In this work we present a method for fusion of direct radiometric data from a thermal camera with inertial measurements to enable ... This session will help you understand how self-driving vehicles robustly establish their precise position within HD

















![Online Spatial Concept and Lexical Acquisition with Simultaneous Localization and Mapping [IROS2017]](https://i.ytimg.com/vi/hVKQCdbRQVM/mqdefault.jpg)
