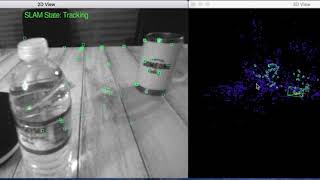
Media Summary: KudanSLAM: Keyframe Constrained Visual SLAM for Visual Odometry This video talks about the conceptual differences between The video demonstrates the effectiveness of fusing wheel
Kudanslam Keyframe Constrained Visual Slam For Visual Odometry - Detailed Analysis & Overview
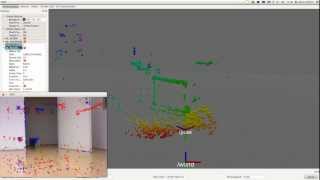
KudanSLAM: Keyframe Constrained Visual SLAM for Visual Odometry This video talks about the conceptual differences between The video demonstrates the effectiveness of fusing wheel Demonstration of the C-KLAM algorithm on a quadrotor dataset in the Walter Library, University of Minnesota. The blue trajectory ... Lecture: Self-Driving Cars (Prof. Andreas Geiger, University of Tübingen) Course Website with Slides, Lecture Notes, Problems ... We are pleased to announce the open-source release of OKVIS: Open
KudanSLAM: LIDAR SLAM on a forward-facing Cepton Vista-P60 Presentation by Yafei Hu, part of the AirLab Summer School 2020. Sessions list, overviews, and links to repos: ...