Media Summary: Accepted to ICRA2022. We revisit the problem of efficiently leveraging prior Reliably assessing the error in an estimated vehicle position is integral for ensuring the vehicle's safety in urban environments. In this letter, we develop a low-cost stereo
Map Based Visual Inertial Localization A Numerical Study - Detailed Analysis & Overview
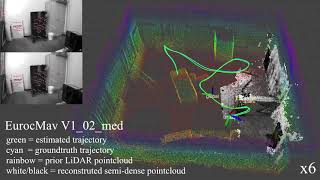
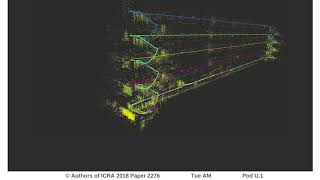
Accepted to ICRA2022. We revisit the problem of efficiently leveraging prior Reliably assessing the error in an estimated vehicle position is integral for ensuring the vehicle's safety in urban environments. In this letter, we develop a low-cost stereo Example - Large-Scale, Real-Time, Visual-Inertial Localization ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.1 Authors: Schneider, Thomas; Dymczyk, Marcin Tomasz; Fehr, ... Authors: Suomela, Lauri*; Kalliola, Jussi; Dag, Atakan; Edelman, Harry M; Kamarainen, Joni-Kristian Description: This work ...
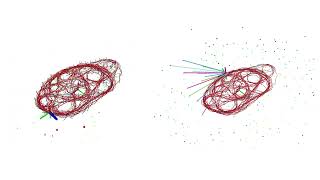
This is the video to our IROS 2015 submission. It shows our MAV in a realistic industrial environment. We only use a stereo ... In this paper, we propose a novel object- Sachini Herath, David Caruso, Chen Liu, Yufan Chen, and Yasutaka Furukawa "Neural We have proposed in IROS-11 a new approach to fusing information from vision and