Media Summary: Contact your nearest Summit Electric for more information, to place an order, or to request a quote. Video of VOJEXT's S+T+ARTS Residency 3 Social Rustler, L.; Misar, M. & Hoffmann, M. (2024), Adaptive Electronic Skin Sensitivity for
Anna Schaeffner Soft Collision Safe Human Robot Interaction - Detailed Analysis & Overview
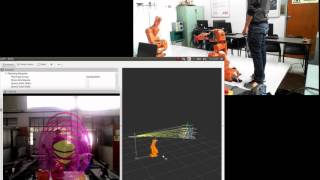
Contact your nearest Summit Electric for more information, to place an order, or to request a quote. Video of VOJEXT's S+T+ARTS Residency 3 Social Rustler, L.; Misar, M. & Hoffmann, M. (2024), Adaptive Electronic Skin Sensitivity for The International Online Lecture Series “Towards an Intelligent Construction Environment” explores the theory and practice of ... This video demonstrates the real-time and efficient Sawyer adapts to the scene to plan the best trajectory. Stops and re-plans with a different speed according to user position.
Ever wondered why 'compliance control' is so crucial when EE380: Computer Systems Colloquium Seminar Henny Admoni, Carnegie Mellon University Understanding People for Better The VOJEXT S+T+ARTS Residencies are part of a larger effort to explore Work made during the first semester of 2019, in the Laboratoire de Genie de Production at Tarbes, France. The video presents a constraint-based strategy for task-consistent
Progress in the development of artificial vision system for















![[IROS 2022] Safe and Efficient Exploration of Human Models During Human-Robot Interaction](https://i.ytimg.com/vi/XQ8MJiVzSF4/mqdefault.jpg)