Media Summary: The video presents a constraint-based strategy for Presented in the 10th International Workshop on Authors: Amit Kumar Pandey, Rachid Alami. Towards
Task Consistent Safe Human Robot Interaction - Detailed Analysis & Overview
The video presents a constraint-based strategy for Presented in the 10th International Workshop on Authors: Amit Kumar Pandey, Rachid Alami. Towards Sawyer adapts to the scene to plan the best trajectory. Stops and re-plans with a different speed according to user position. Sawyer slows down as the operator gets closer. (ROS + Kinect + Sawyer Rethink This work describes a control framework using a capacitive skin for advanced and
Alan HUI BON HOA, Vice President of United Robotics Group, shows us the evolution of Video Attachment for the Paper Integrating Perceptions: A Human-Centered Physical Svarny, P.; Tesar, M.; Behrens, J. K. & Hoffmann, M. (2019), video credits: S. Calinon, I. Sardellitti The video shows a Barrett WAM 7 DOFs manipulator learning an ironing In this video, invariance control is used to keep the Cartesian translational motion of the end effector of an anthropomorphic ...













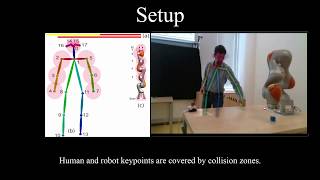
![[RO-MAN 2025] Integrating Perceptions: A Human-Centered Physical Safety Model for HRI](https://i.ytimg.com/vi/jDrJ4rLpqns/mqdefault.jpg)