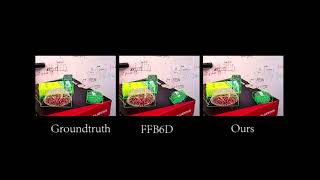
Media Summary: In this demo, we show the qualitative performance of our proposed method from the paper "RGB-based Category-level 6D Object Pose Estimation from Approximate3 3D Models for Orbital Robotics Authors: Castro, Pedro*; Kim, Tae-Kyun Description: Learning based
Stereobj 1m Large Scale Stereo Image Dataset For 6d Object Pose Estimation - Detailed Analysis & Overview
In this demo, we show the qualitative performance of our proposed method from the paper "RGB-based Category-level 6D Object Pose Estimation from Approximate3 3D Models for Orbital Robotics Authors: Castro, Pedro*; Kim, Tae-Kyun Description: Learning based This project is an independent project done under Dr. William Hoff at Colorado school of mines university. Goal of the project is to ... Supplementary video to accompany my co-author's paper: Module-Wise Network Quantization for Authors: Yinlin Hu, Pascal Fua, Wei Wang, Mathieu Salzmann Description: Most recent
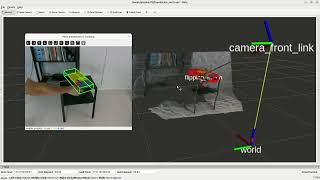
Credit to: ammar-n-abbas/FoundationPoseROS2 Adopted and Improved for custom model detection. Only a depth camera, ... Deep Fusion for multi-modal 6D Pose Estimation Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ... Project Page: Authors: He Wang, Srinath Sridhar, Jingwei Huang, Julien Valentin, ... Part of Project 6 in ESE 650 - Learning in Robotics course at University of Pennsylvania. Authors: Alexander Krull, Eric Brachmann, Frank Michel, Michael Ying Yang, Stefan Gumhold, Carsten Rother Abstract: ...