Media Summary: 6D Object Pose Estimation from Approximate3 3D Models for Orbital Robotics This video introduces a markerless 6DoF engine for precise Published at European Conference on Computer Vision, Zurich 2014.
6d Object Pose Estimation From Approximate3 3d Models For Orbital Robotics - Detailed Analysis & Overview
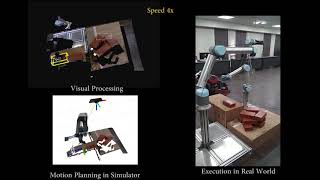
6D Object Pose Estimation from Approximate3 3D Models for Orbital Robotics This video introduces a markerless 6DoF engine for precise Published at European Conference on Computer Vision, Zurich 2014. Authors: Castro, Pedro*; Kim, Tae-Kyun Description: Learning based 6D Pose Estimation for Robotic Pick and Place This is a short clip to demonstrate the speed of the predictions of SingleShotPoseEstimation and Betapose. The estimations were ...
In this study, we introduce a deep-learning approach for determining both the 6DoF Rodin Gen-2.5 10M-Poly Showcase The world's first 10M-polygon #

![[CVPR 2025] Pos3R: 6D Pose Estimation for Unseen Objects Made Easy](https://i.ytimg.com/vi/_a9q_O8yN4E/mqdefault.jpg)