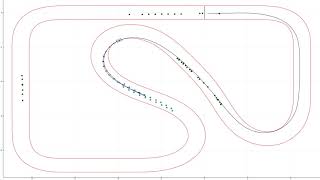
Media Summary: Cyan dots: sampled safe set Green dots: data used to do system identification (local least mean square) Black Presented paper can be downloaded here: ... This video is part of an ICRA 2016 submission. The Georgia Tech AutoRally platform drives fully autonomously using only ...
Simulation Learning Model Predictive Control For Autonomous Racing - Detailed Analysis & Overview
Cyan dots: sampled safe set Green dots: data used to do system identification (local least mean square) Black Presented paper can be downloaded here: ... This video is part of an ICRA 2016 submission. The Georgia Tech AutoRally platform drives fully autonomously using only ... Credit to Shuqi Xu, Ugo Rosolia and Jon Gonzales @ Berkeley Multimedia attachment of the paper "A Nonlinear Link to addendum: Results on the AutoRally platform when varying the number of sampled rollouts ...
Agile quadrotor flight in challenging environments has the potential to revolutionize shipping, transportation, and search and ... Using a simple car example, this video provides insight into an Udacity Self-Driving Car Nanodegree Term 2 Project 5: