Media Summary: This video contains demonstrations of the described algorithm for Video attachment to the submission of my paper to MRS 17. High-Speed Navigation of a Homogeneous Swarm of 100 Nonholonomic Wheeled Mobile Robots
Shape Formation In Homogeneous Swarms Using Local Task Swapping - Detailed Analysis & Overview
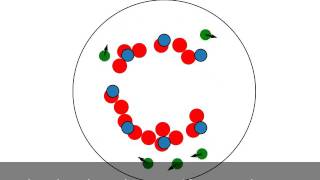
This video contains demonstrations of the described algorithm for Video attachment to the submission of my paper to MRS 17. High-Speed Navigation of a Homogeneous Swarm of 100 Nonholonomic Wheeled Mobile Robots A Minimalistic Approach to Segregation in Robot Swarms - 2 class 10 clusters Authors: David Caballero Angel A. Cantu Timothy Gomez Austin Luchsinger Robert Schweller Tim Wylie Abstract: This paper ... A synchronous implementation of a paper by Hanlin Wang and Michael Rubenstein of Northwestern University (no affiliation).
In this video, we demonstrate the power of X-Klaim, a high-level coordination language, for implementing a multi-robot line ... Morphogenesis allows millions of cells to self-organize into intricate structures Published as keynote and paper at Diep, Q.B. and Zelinka, I., 2018, September. The Movement of Transitioning GamsPlugins simulation engine into Shape Formation - ECE6504 - Autonomous Coordination - Spring 2018