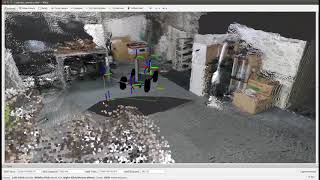
Media Summary: RTABMap generates point cloud with RealSense T265 and D435i pretty bad performance but the goal was to generate a better depthmap so i can improve the 3-D Point cloud generation using Intel realsense D435i
Point Cloud Map Intel Realsense D435 T265 - Detailed Analysis & Overview
RTABMap generates point cloud with RealSense T265 and D435i pretty bad performance but the goal was to generate a better depthmap so i can improve the 3-D Point cloud generation using Intel realsense D435i ROS RTAB-MAP realsense d435 and t265 localization and mapping Pedestrian 3D Detection with Intel Realsense d435i / Pointcloud and Tensorflow at 120 fps 3D-Mapping with RTABmap and Intel realsense camera.
A comparison of modern viSLAM algorithms -- on-board SLAM of IntelRealSence Intel Realsense D435i Depthmap Test Video