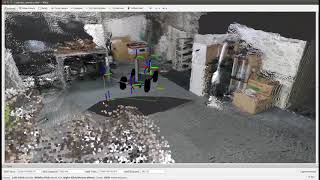
Media Summary: pretty bad performance but the goal was to generate a better This is an attempt to generate a pointcloud using the The quality of the pointcloud is pretty bad, i need to do more research to see if i can come up with something usable.
Intelrealsense T265 Live Depthmap - Detailed Analysis & Overview
pretty bad performance but the goal was to generate a better This is an attempt to generate a pointcloud using the The quality of the pointcloud is pretty bad, i need to do more research to see if i can come up with something usable. Depth Calculation using Intel RealSense T265 D435 Point Clouds aligned using transformation matrices which were taken from RTABMap generates point cloud with RealSense T265 and D435i
In case you are not interested in true WGS84 coordinates or you are simply unable to correctly position the floor plan due to a ... A comparison of modern viSLAM algorithms -- on-board SLAM of IntelRealSence Welcome to the Sensor Showcase series, where we explore different types of sensors commonly used in our Clearpath robotics ... This video shows code that will allow you to show images from the Your support helps me post videos more frequently: AI Vision Courses + Community → source code and files: ...
First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ...