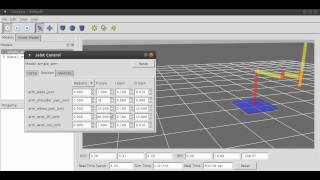
Media Summary: This video shows how I managed to manually tune the source code: command: roslaunch zm_robot_gazebo zm_robot_pid.launch ... In this tutorial I explain how to implement
Pid Tuning Position Controller In Gazebo Robotics Simulator - Detailed Analysis & Overview
This video shows how I managed to manually tune the source code: command: roslaunch zm_robot_gazebo zm_robot_pid.launch ... In this tutorial I explain how to implement A rotary inverted pendulum is tested using conventional control theories like This is my own side project after taking Control Theory course for learning purpose. In this course you will learn how to setup ROS control for a custom 6 axis
This is a custom environment playing pool in ROS, simulated in

![[ROS Q&A] 112 - How to manually tune a PID with ROS Control](https://i.ytimg.com/vi/gA-O39LrXzI/mqdefault.jpg)