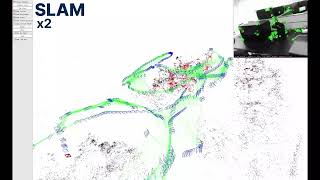
Media Summary: Localization of TartanAir Dataset using ORB SLAM3 and GTSAM Test in NCKU library underground parking lot. This is a demonstration of ORB_SLAM3 performing visual SLAM to produce a 3D trajectory from ORB features detected and ...
Orbslam With Localization Enabled - Detailed Analysis & Overview
Localization of TartanAir Dataset using ORB SLAM3 and GTSAM Test in NCKU library underground parking lot. This is a demonstration of ORB_SLAM3 performing visual SLAM to produce a 3D trajectory from ORB features detected and ... Pythonic implementation of ORB Feature detection based Monocular SLAM. My Socials: Instagram: ... Localization of a tello using ORB SLAM - Part 1 (2024) E-mail : rodrigosarmentoxx.com GitHub: This project Paper ...
Localization of a tello using ORB SLAM - Part 2 (2024) SLAM explained in 5 minutes Series: 5 Minutes with Cyrill Cyrill Stachniss, 2020 There is also a set of more detailed lectures on ... My First attempt to deploy ORB SLAM2 with MYNTEYE Stereo Camera on Jetson TX2. Multiple Map ORB-SLAM Localization in Tsukuba Challenge 2016 SLAM is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping ... International Conference Information Fusion.