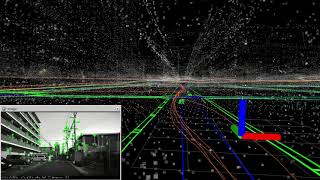
Media Summary: Localization of TartanAir Dataset using ORB SLAM3 and GTSAM Camera: intel real-sense RGB-D camera Running time / Platform: 30Hz (0.025[sec]) / 60Hz (0.007[sec]) frame rate on Orange Pi ... This is a demonstration of ORB_SLAM3 performing visual
Indoor Localization Using Orb Slam - Detailed Analysis & Overview
Localization of TartanAir Dataset using ORB SLAM3 and GTSAM Camera: intel real-sense RGB-D camera Running time / Platform: 30Hz (0.025[sec]) / 60Hz (0.007[sec]) frame rate on Orange Pi ... This is a demonstration of ORB_SLAM3 performing visual Localization of a tello using ORB SLAM - Part 2 (2024) Visit the project webpage: Source Code available: ... For more information, please visit our website.
In this video we demonstrate our latest version of Dragonfly. It uses the output of the smartphone's camera to provide a very ...