Media Summary: Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ... This is a demonstration of ORB_SLAM3 performing visual waypoint based navigation for monocular indoor drones. Setup instruction and ROS packages references at: ...
Orb Slam In3 - Detailed Analysis & Overview
Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ... This is a demonstration of ORB_SLAM3 performing visual waypoint based navigation for monocular indoor drones. Setup instruction and ROS packages references at: ... Extended ORB-SLAM3 into Multi-camera Setup Try to load 3D model(.obj) via node named MonoAR_OBJ, change the filename in /AR_OBJ/ViewAR.cc (default name arm.obj) ... ORB-SLAM3: TUM-VI Stereo-Inertial, room1+magistrale1+magistrale5+slides1
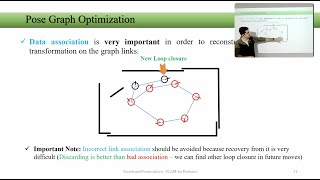
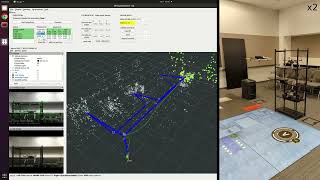
Green Points represent stationary points used to estimate camera pose, Black points are points that moved. The Initial marking of ... ORB-SLAM3: TUM-VI Monocular-Inertial, Room1+Room2+Room3+Room4+Room5+Room6