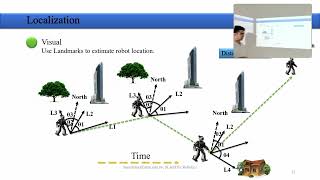
Media Summary: This video provides some intuition around Localization of TartanAir Dataset using ORB SLAM3 and GTSAM
Ch13 Slam For Robotics Course Orb Slam Algorithm Details Pose Graph Optimization Sift Orb - Detailed Analysis & Overview
This video provides some intuition around Localization of TartanAir Dataset using ORB SLAM3 and GTSAM