Media Summary: This video presentation describes the work in the paper titled: Decentralized task assignment for multi-robot pickup and delivery in logistic scenarios - Online Authors: Aalok Patwardhan, Andrew J. Davison Dyson
Multi Robot Pickup And Delivery Via Distributed Resource Allocation - Detailed Analysis & Overview
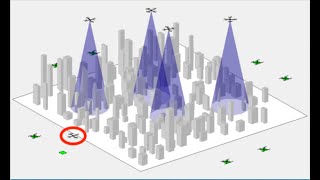
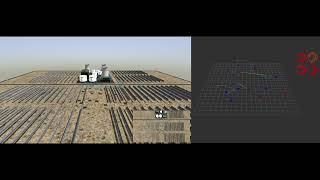
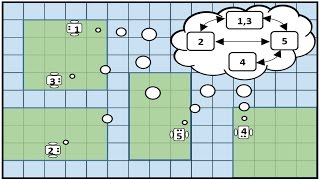
This video presentation describes the work in the paper titled: Decentralized task assignment for multi-robot pickup and delivery in logistic scenarios - Online Authors: Aalok Patwardhan, Andrew J. Davison Dyson Video supplement to our ICRA submission. For questions, please contact awc11.edu. Abstract: This paper presents a ... Please see the following two papers if you are interested in: 1. Programming Large-Scale Predictive Multi Robot Task Allocation Algorithm - Thermosolar Radiation Monitoring
S. Park, Y. D. Zhong, and N. E. Leonard, "











![[IROS 2025] MGPRL: Distributed Multi-Robot Relative Localization in Large Indoor Environments](https://i.ytimg.com/vi/5AQ8ZoqTEp8/mqdefault.jpg)